|
 |
| 当前位置:首页 - 综合技术 |
实物体重复扰动真空引发正电子群传递负能的实验测量文章来源:嘉兴市南湖区长军能源技术研究所 | 发布日期:2010-07-16 | 作者:董长军 | 点击次数:
摘要:本实验以两个质量相等的轴对称实物体模拟自转的地球围绕太阳中心转动的机理重复扰动真空,并用电度表和计时秒表对实验装置中的实物体相对真空重复扰动和一次扰动所消耗电功率以及惯性转动的时间分别进行测量。测得:实物体重复扰动真空时惯性转动时间数值大。实验显示:实物体重复扰动真空可引发正电子群向实物体传递负能。 关键词:真空, 正电子, 实物体, 负能,惯性转动。 引 言 保罗•狄拉克(Paul Adrien Maurice Dirac 1902--- 1984)指出:“真空是填满最低可能能量(负能态正电子)的空间区域”[1]。这些负能态正电子虽然不能从物理实验中观察到,但正电子携带的负能却不是不能传递的。为验证负能传递的可能性,本文作者制造了一台实验装置[2],现将实验装置的结构及实验过程描述如下,希引起热衷于寻找新能源的学者对实验结果共同参与讨论。 1.实验装置设计的基本思想 基于狄拉克“负能态”空间的观点,我们认为,负能的传递应该与物质的相对运动有关。 例如,某一正能驱动的实物体相对“负能态”空间从一点到另一点的位移运动,正能在实物体相对空间运动的过程中被传递到空间,相反,空间中的负能也会在空间相对实物体运动的过程中被反传递到实物体。由于实物体的运动轨迹为一条直线或螺旋线即一维运动,因此其对空间只进行一次扰动。实物体相对空间位移的速率V与空间相对实物体位移的速率-V数值相加等于零,正能、负能相互传递的效果也等于零,因而,实物体无法从空间中传递出多余的负能。 然而,客观还存在实物体受正能驱动相对空间同时进行不同方向的二次位移(相似于自转的地球围绕太阳中心的运动)的运动。在运动过程中,正能、负能必然进行相互传递。由于实物体的运动轨迹为2条双螺旋线即二维运动,因此可对空间进行重复扰动。其位移速率VK=V1+V2,实物体的二维运动所消耗正能E2=1/2mV12+1/2mV22。考虑到“负能态”空间中物质性质的特殊性,空间相对实物体的位移不可能按照双螺旋的轨迹运动,空间相对实物体的位移会以重复交叉的形式进行。于是,空间相对实物体位移运动的速率-V1、-V2必然会产生叠加效应,所传递的负能-E2=1/2m(-V1+-V2)2。这样,在实物体二维运动的能量系统,正能、负能相互传递的效果不等于零(-E2+E≠0),最终得到的数值为负值。因此,二维运动的实物体有可能从空间中传递出多余的负能。 笔者设想,制造一台以两个质量相等的轴对称实物体模拟地球绕太阳中心转动机理而运行的叠加飞轮组机械装置可以实现飞轮组对空间的重复扰动。 笔者推断,如果“负能态”空间真实存在,那么,叠加飞轮组机械装置中的电动机在输入等数值电功率驱动的情况下,飞轮组重复扰动和一次扰动空间后绕主轴惯性转动的时间数值就一定不会相等。分别测量两组实验中的主轴惯性转动时间,只要两组实验的时间数值不相等,即可证明飞轮组重复扰动能够从空间中传递出多余的负能。 2、实验机械装置结构
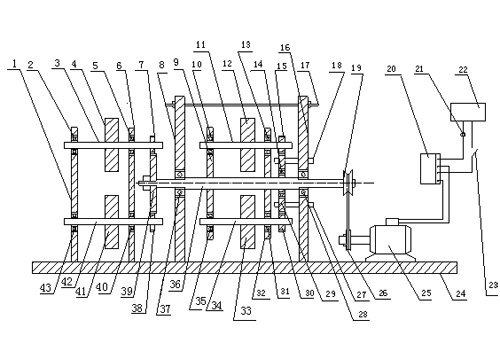
图1中(1)为支架B-1,(2)为轴承B-1,(3)为副轴B-1,(4)为飞轮B-1,(5)为轴承B-2,(6)为支架B-2,(7)为驱动齿轮B-1,(8)为主轴支架1,(9)为支架A-1,(10)为轴承A-1,(11)为副轴A-1,(12)为飞轮A-1,(13)为轴承A-2,(14)为导向轴承,(15)为驱动齿轮A-1,(16)为主轴支架2,(17)为螺栓1,(18)为螺栓2,(19)为皮带轮1,(20)为电度表,(21)为电流表,(22)为电源,(23)为开关,(24)为底座,(25)为电动机,(26)为皮带轮2,(27)为螺栓3,(28)主轴轴承1,(29)为传动齿轮2,(30)驱动齿轮A-2,(31)为轴承A-3,(32)为支架A-2。(33)为飞轮A-2,(34)为副轴A-2,(35)轴承A-4,(36)为主轴,(37)主轴轴承2,(38)为驱动齿轮B-2,(39)为传动齿轮1,(40)为轴承B-3,(41)为飞轮B-2,(42)为副轴B-2,(43)轴承B-4。 支架A-1、A-2的长度L=320mm,两端分别由轴承A-1、A-2、A-3、A-4固定副轴A-1、A-2,公差配合适中。副轴A-1、A-2中部外径分别与飞轮A-1、A-2的中心孔固定连接。飞轮A-1、A-2的直径Φ=148mm,长度L=30mm,重量W=4kg。飞轮A-1、A-2与支架A-1、A-2组合的总质量m=12kg。 副轴A-1、A-2的右端分别与驱动齿轮A-1、A-2的中心孔固定连接。传动齿轮1由螺栓2、3固定在主轴支架2的内侧,其不转动。传动齿轮1外径Φ=195mm,齿数为128齿,传动齿轮1与驱动齿轮A-1、A-2啮合,啮合间隙为0.3mm,驱动齿轮A-1、A-2的外径Φ=65mm,齿数为42齿。速比为1:3.05。电动机功率为1.5kw,转速为1400转/分,以1:1.5转速比驱动主轴,主轴转速为2100转/分。 支架B-1、B-2的长度L=450mm,支架B-1、B-2的下端与底座左边表面固定连接,支架B-1、B-2的上部由轴承B-1、B-2、B-3、B-4固定副轴B-1、B-2,公差配合适中。副轴B-1、B-2的外径中部与飞轮B-1、B-2的中心孔内径固定连接。飞轮B-1、B-2的直径Φ=148mm,长度L=30mm,质量m=4kg。副轴B-1、B-2的右端外径与驱动齿轮B-1、B-2的中心孔固定连接,驱动齿轮B-1、B-2的外径Φ=65mm,齿数为42齿。传动齿轮2外径Φ=195mm,齿数为128齿,其中心孔与主轴的左端外径固定连接,其可随主轴转动。传动齿轮2与驱动齿轮B-1、B-2啮合,啮合间隙为0.3mm,速比为1︰3.05。 所述实验机械装置的电度表的计量量度数值1kw=625转
|
|||
|
地址:广东省广州市天河区五山能源路2号 联系电话:020-37206200 邮箱:newenergy@ms.giec.ac.cn 经营许可证编号:粤B2-20050635 粤ICP备:11089167号-4 主办:中国科学院广州能源研究所 1998-2013 newenergy.org.cn/newenergy.com.cn Inc. All rights reserved. 中国新能源网 版权所有 |